密碼找回
賬號找回
刪除信息
常見問題
雷頓Leader二次元測量儀維修案例講
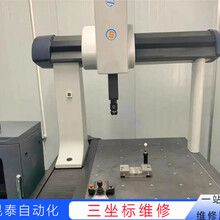
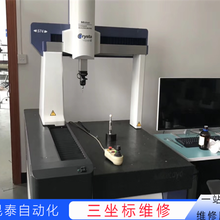
雷頓Leader工業(yè)三坐標維修來找昆泰
力德LEAD三坐標測量誤差維修技巧介紹
mitutoyo二次元測量儀維修有關內(nèi)容
2年
微信在線
13961122002
東京精密三坐標報警維修小竅門
¥556
愛德華AEH三坐標不能工作維修故障表
瑞士TESA三坐標噪音大維修速度快
臺灣德量三坐標開機無反應維修精選篇
Wenzel溫澤三坐標不能工作維修技巧介紹
弗爾迪三坐標突然停機維修注意細節(jié)